
1. Einleitung
Der Bau eines einfachen (IoT-)Strahlungsmessgeräts mit Geiger-Müller-Zählrohr ist weder sonderlich komplex noch mit hohen Kosten verbunden.
Im folgenden Artikel dokumentiere ich den Bau einfacher wie fortgeschrittener Prototypen ohne jedoch sehr ins Detail zu gehen.
Viele Details sowie eine Bauteilliste gibt es auf meiner hackaday.io-Projektseite (in Englisch). Dort besteht auch die Möglichkeit Kommentare abzugeben oder Fragen zu stellen.
2. Projekt Geigerzähler
2.1 Schaltungskonzept
Das Steuersignal zur Generierung der Zählrohrspannung bildet beim gewählten Schaltungskonzept (ein an sich wenig origineller Aufwärtswandler oder engl. boost converter) eine PWM (Pulsweitenmodulation oder engl. Puls Width Modulation) mit Frequenzen im Bereich von 1-10 Kilohertz.
Diese PWM steuert einen hochvoltverträglichen Bipolartransistor (T2 im Schaltplan) mit ebenjenen Frequenzen in schneller Folge auf/zu.
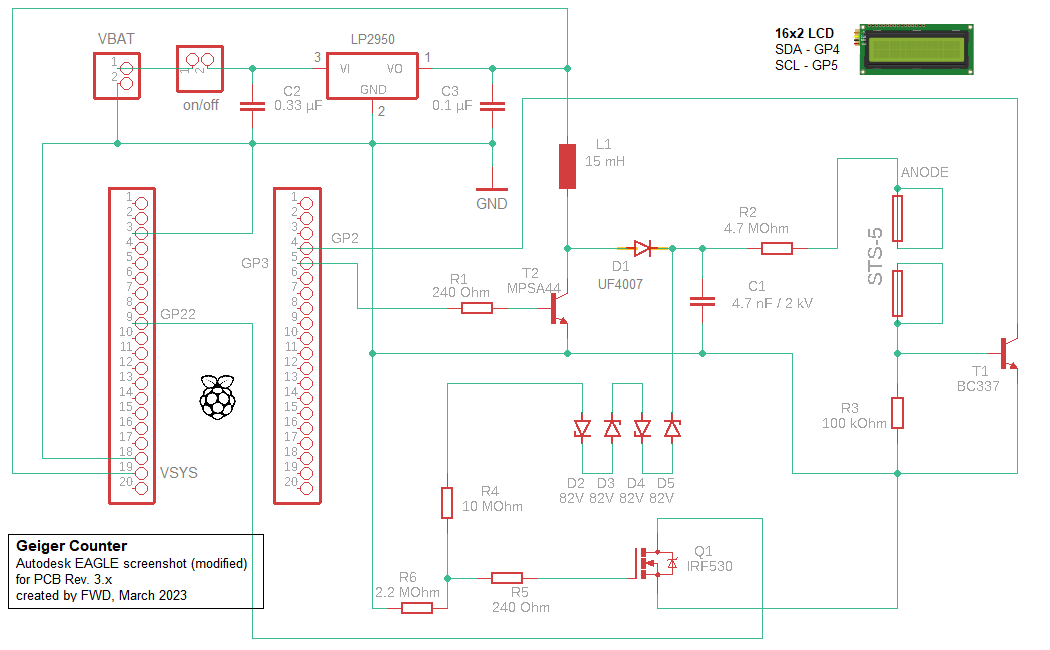
Für die schiere PWM-Generierung wäre ein schlichter IC wie der weit verbreitete NE555 sicher ausreichend. Da ich den Geigerzähler jedoch nach und nach mit Funktionalität erweitern will verwendete ich von Anfang ein komplettes Mikrocontroller Board (Raspberry Pi Pico mit RP2040).
Der RP2040 besitzt zur Erzeugung der PWM dedizierte HW, somit besteht keine Notwendigkeit diese umständlich per SW zu implementieren und die Bibliotheken des Pi Pico C/C++ SDK stellen alles Notwendige bereit.
Die Spule L1 ist das eigentlich hochspannungserzeugende Bauteil der Schaltung. Aufgrund rascher Stromänderungen – bedingt durch das Aufsteuern/Schließen des Transistors – entsteht eine hohe Selbstinduktionsspannung (hier >400V). Unterschiedliche Induktivitätswerte beeinflussen diese Spannung in gewissen Grenzen, wenn auch nicht ganz so gezielt und ohne Weiteres nachvollziehbar wie die PWM-Parameter.
Kondensator C1 sorgt in Kombination mit Diode D1 für die Energiespeicherung. Bipolartransistor T1 ist Bestandteil der Zähllogik, FET Q1 mit Zener-Dioden D2-D5 Teil der Hochspannungsregelung.
Codebeispiele in C (und daraus kompilierte Files) mit empirischen Werten für die PWM-Parameter Frequenz und Tastgrad liegen in meinem RasPi Github-Repository ab.
2.2 Zählrohre
Ich experimentierte während der Entwicklung mit zwei verschiedenen Zählrohren. Diese unterschieden sich in ihren geometrischen Dimensionen, ihrer Empfindlichkeit und dem Preis.
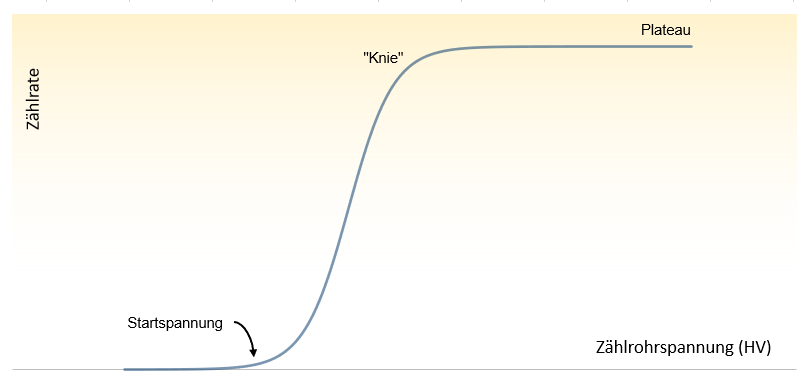
Ganz okay und gut verfügbar für erste Tests ist ein Z1A Zählrohr vom Elektronikversand, welches Stand April ’22 fünfzehn Euro kostete.
Wesentlich besser sind SBM-201 Zählrohre aus alten UdSSR-Beständen, welche ich bei Händlern aus Osteuropa für ca. dreißig Euro (Stand Mai ’22) erstehen konnte.

2.3 Philosophie für den Prototypenbau
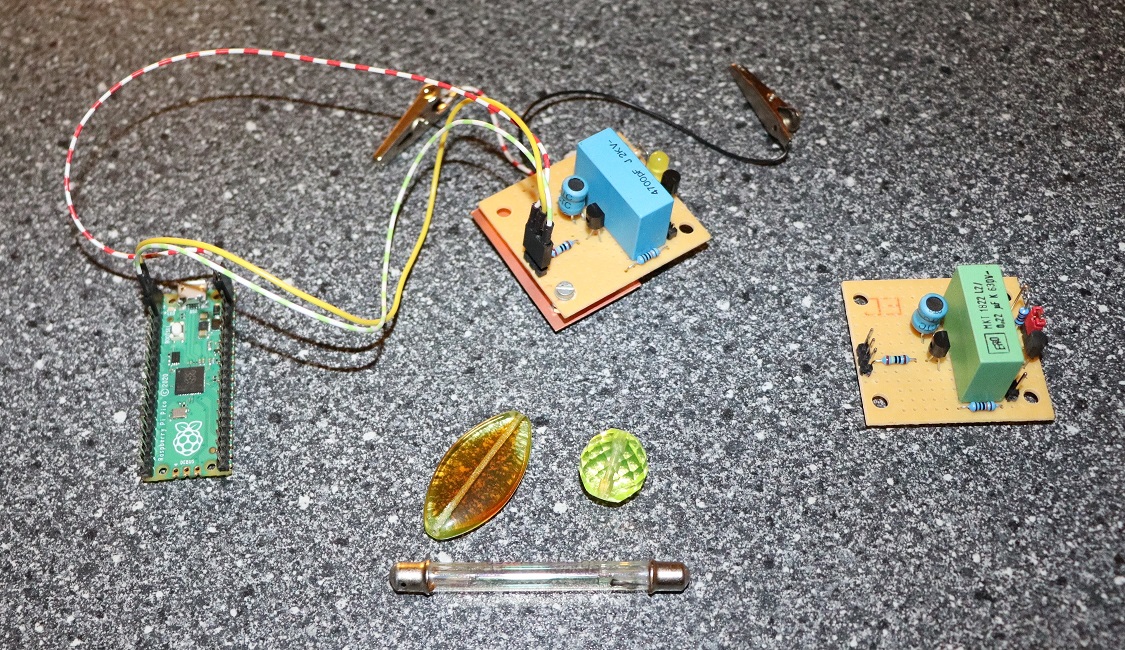
Frühe Versuchsschaltungen sind auf kleinen, billigen Lochrasterplatinen mit aus Elektroschrott ausgeschlachteten Bauelementen aufgebaut.
Rascher Wechsel auf ein Printed Circuit Board (PCB) inklusive Gehäuse ist ratsam, da das EMV-Verhalten bei windigen Bastelaufbauten nicht sonderlich gut sowie ein Berührschutz angeraten ist (die Hochspannung auf der Platine ist nicht gefährlich, es ist aber unangenehm wenn z. B. ein Kondensatorbeinchen versehentlich angefasst wird).
Auch sind bei solider Geometrie und Verdrahtung Ergebnisse leichter reproduzierbar. Ohnehin sollte sich Anodenwiderstand R2 nah am Zählrohr befinden (Vermeidung Streukapazitäten) und mindestens so groß sein wie das Datenblatt vorschreibt, wenn möglich noch größer.
Aus persönlicher Neigung bevorzuge ich beim Prototypenbau “Durchsteck-“, das heißt bedrahtete Bauelemente zu SMD-Komponenten, insbesondere da Abmessungen, Gewicht und auch Ästhetik (noch) keine entscheidende Rolle spielen.
Als Strahler verwende ich frei im Handel erhältliches Uranglas. Aus naheliegenden Gründen strahlt dieser Stoff nicht sehr stark; zum Testen von Prototypen ist er jedoch gut geeignet.
Ein elektrischer Kurzschluss der Rohranschlüsse, realisiert mit z. B. zwei Klemmprüfspitzen und einer Messleitung, kann darüber hinausgehend eine starke Strahlungsquelle emulieren und stellt einen Robustheitstest dar.
3. Entwicklungshistorie (Displays, IoT, GPS)
Im Folgenden ein kurzer, unvollständiger Abriss der Geigerzähler-Versuchsschaltungen und Prototypen in den verschiedenen Entwicklungsständen.
3.1 Visualisierung mit einzelner LED
Der erste funktionsfähige Versuchsaufbau. Ergebnis ist wie zu erwarten noch wenig beeindruckend. Einen Regelkreis für die Zählrohrspannung gibt es nicht.
Der BC337 Kollektor-Emitter “Lastkreis” (siehe Schaltplan in Absatz 2.1) hat eine LED incl. Vorwiderstand und ist an USB +5V angeschlossen. Neben dieser simplen optischen Indikation gibt es keine Zählung oder Auswertung von Impulsen.
Die Krokolemmen bieten Flexibilität für die zwei unterschiedlichen Rohrgeometrien. Man muss jedoch in jedem Fall darauf achten dass das Zählrohr nicht verpolt ist.
3.2 Zählrohrspannungsregelung und OLED-Anzeige
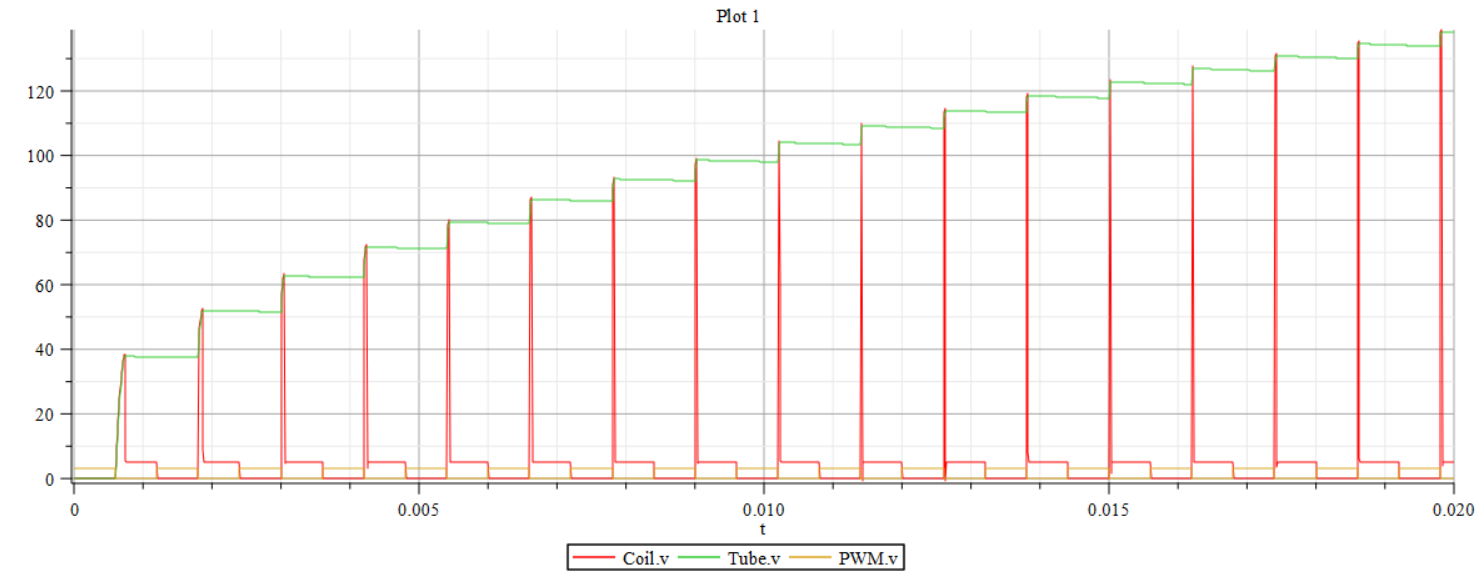
Die auf einem mehrfach verbesserten PCB aufgebauten Prototypen sind mit einer Zweipunktregelung versehen (siehe Schaltplan in Absatz 2.1; verwendet als Regler für die +5V ist zunächst ein L7805CV Baustein).
Überschreitet die Hochspannung einen durch die Zener-Dioden vorgegebenen Schwellwert wird die PWM abgeschaltet, was aufgrund der Regelung zyklisch geschieht. Dies hat mehrere Vorteile, der entscheidende Vorteil ist natürlich die Stabilisierung folglich Stabilität der Spannungen.
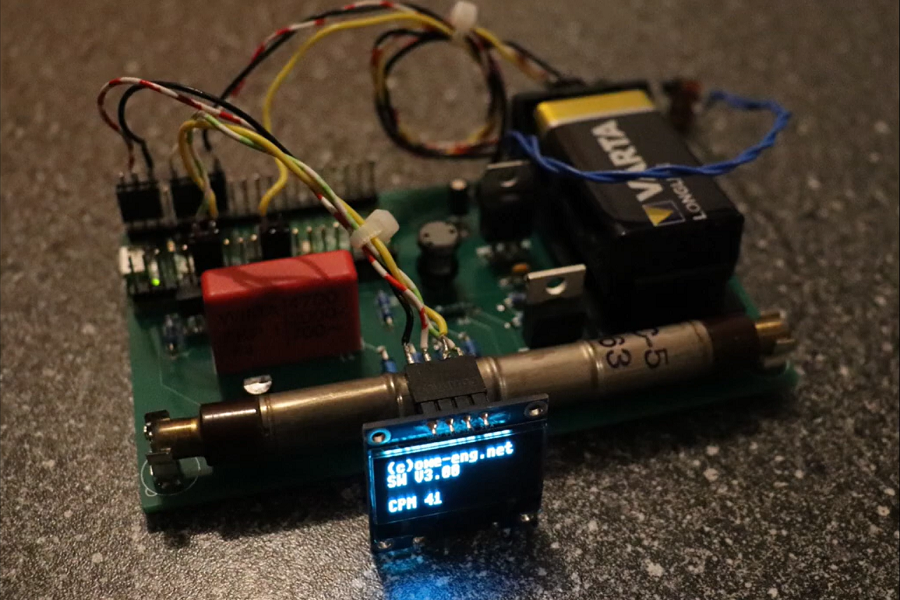
3.2.1 “Counts Per Minute” (CPM)
Der auf dem Display angezeigte Wert für CPM entspräche einheitentechnisch der Maßeinheit Becquerel, würde man diesen durch 60 dividieren. Es ist jedoch zu beachten, dass CPM nur ein (unbereinigter) Messwert ist welcher sich vom tatsächlichen Zerfall (geringfügig?) unterschiedet.
Da radioaktiver Zerfall nur statistisch vorhersagbar ist und zufällig abläuft gibt es unterschiedliche Möglichkeiten, einen CPM-Wert aussagekräftig darzustellen.
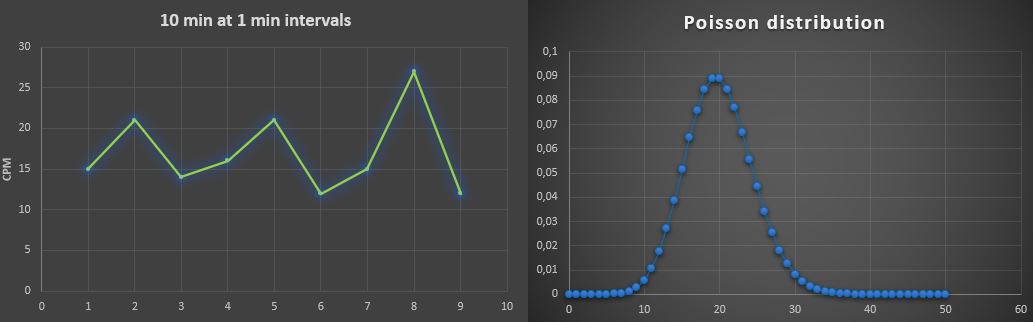
Zum Beispiel kann man das arithmetische Mittel extrapolierter CPM Werte über ein bestimmtes Zeitfenster berechnen: zwei Sekunden Messung, Extrapolation auf 60 Sekunden, dann mit fünf extrapolierten Werten einen Mittelwert bilden.
Beispielcode:
(...)
for (int i=0; i < ringbuffer_elements; i++)
{
sum += ringbuffer[i];
}
mean = sum/ringbuffer_elements;
(...)
Der neuste Wert ersetzt dabei fortlaufend den ältesten Wert (FIFO), was einem Ringpuffer Prinzip entspricht.
3.2.2 OLED-Anzeige
Nach ein paar Versuchen mit 16×2 Flüssigkristallanzeigen (LCDs) ist eine OLED-Anzeige der einzige Slave am I2C-Bus. Verwendet wird der erste von insgesamt zwei I2C-Controllern des RP2040 Mikrocontrollers, und hier Pin 4 (SDA) und Pin 5 (SCL).
Das abgebildete Modul (0,96 Zoll mit SSD1306-Controller) ist nicht nur hinsichtlich der geringen Stromaufnahme und dem weiten Temperaturbereich interessant (selbst -25°C sind kein Problem), sondern hat auch eigene Pull-Up-Widerstände auf der Platine aufgelötet.
Die abgebildete 16×2 LCD Platine besitzt diese Pull-Up-Widerstände nicht, somit aktiviert man für dieses Display entweder die internen Pull-Up-Widerstände des RP2040, oder nutzt zwei externe Pull-Up-Widerstände (z. B. mit Wert 3,9 kOhm).
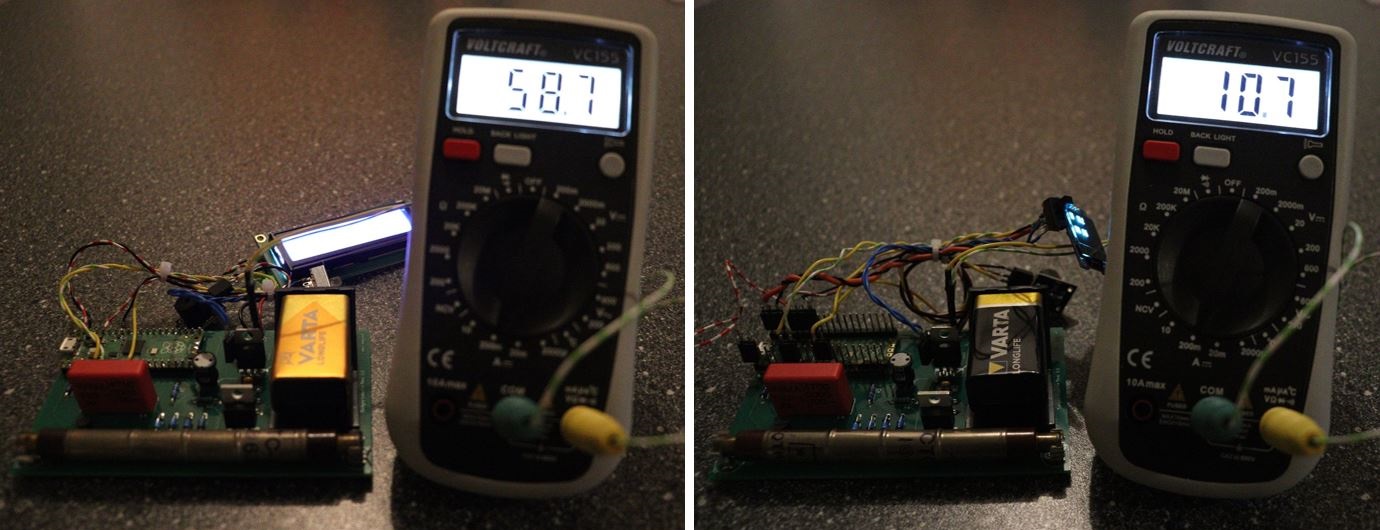
Die internen Widerstände des RP20402 sind anscheinend anfällig für Rauschen/Einstrahlungen (?), was zu sporadischen Funktionsausfällen der Flüssigkristallanzeige führt sind Kabel “wild” verlegt oder schlicht zu lang, daher wären externe Widerstände zu bevorzugen3.
Da man bei OLED-Anzeigen einzelne Pixel ansteuern kann sind auch kleine Grafiken darstellbar. Da mehr angesteuerte Pixel mehr Batteriestrom bedeuten habe ich davon aber keinen Gebrauch gemacht.
3.3 IoT-Fähigkeit
Die IoT-Fähigkeit (Internet of Things) ist ein nützliches Feature welches in diesen Tagen nicht mehr schwierig aufzusetzen ist. Verwendbar sind externe WiFi- (ESP8266 oder ein Klon hiervon) und BLE- (Bluetooth Low Energy) Module.
Im Video wird die Verwendung des RN4870 BLE IC von Microchip demonstriert. Rohwerte sind abrufbar in einer Smartphone App (“BLE Scanner”).
Die beste Alternative hierzu wäre wohl den Raspberry Pi Pico W zu nutzen, der seit Februar ’23 WiFi und Bluetooth fähig ist und identische Geometrie aufweist, somit problemlos in mein PCB einzulöten ist (die Massefläche ist nicht für die WiFi-Antenne optimiert).
3.4 GPS-Ankopplung
Erweiterung mit einem Pico-GPS-L76B GNSS Modul das sich einfach auf den Pico Standard Header aufstecken lässt.
Die Idee ist, CPM-Werte zusammen mit einem geographischen Standort anzuzeigen.
Für ein bequemes Testen des Aufbaus verwende ich zwei Raspberry Pi Pico die über die UART Schnittstelle verbunden sind. Auf dem zweiten Pico läuft dabei kein C-Code sondern Micropython.
Die Konfiguration ist dabei noch etwas abenteuerlich, da eine Polling-Schleife CPM-Werte abfragt: eine extra Leitung signalisiert ein UART-Startbit an einem separatem GPIO, Zeichen werden einzeln aus dem Puffer gelesen und sofort auf der (zweiten) OLED-Anzeige dargestellt.
Ein Beispielcode findet sich in meinem Github-Repository.
4. Verbesserungen und Ausblick
Ergänzend zur IoT- und GPS-Fähigkeit könnten Messdaten auf einer SD-Karte am SPI-Bus gespeichert werden, eine weitere Schnittstelle des RP2040.
Die Versorgung über Linearregler wie dem LP2950, oder mehr noch dem L7805CV ist ineffizient, und kann unter der Prämisse der Stromersparnis anders gestaltet sein (Abwärtswandler).
Einige Vorgaben für robustes Design sind bei meinen Prototypen verletzt, etwa mit der Positionierung des Anodenwiderstandes nicht wirklich nah am Zählrohr oder durch Masseflächen im Bereich der Hochspannung (Gefahr von Kriechströmen die u. U. den Leiterplatten-Kunststoff schädigen).
Nützlich neben z. B. auch einem größeren Display wäre außerdem ein Gehäuse aus dem 3D-Drucker, und generell Anbauteile für gute “Haptik” und den Berührschutz.
5. Weiterführende Informationen
5.1 Fußnoten
1 ich erhielt den Hinweis dass es sich bei dem abgebildeten Zählrohr nicht um ein SBM-20, sondern um das Vorgängermodell STS-5 mit sehr ähnlicher Spezifikation handelt; die aufgedruckten kyrillischen Buchstaben verraten in der Tat das Zählrohrmodell (“CTC-5”)
2 diese Widerstände sind eigentlich FETs die im linearen Bereich ihrer ID-zu-VDS Kennlinie arbeiten, somit ist erwähntes Rauschen nicht nur rein thermischer Natur (“weißes Rauschen”) wie bei einem ohmschen Widerstand; die große Bandbreite an Werten (lt. Datenblatt 50k-80k) entsteht durch Varianzen im Fertigungsprozess
3 zudem wird das LCD auch mit 5V statt mit 3,3V versorgt; schaltungstechnisch kann man die Geräte problemlos verbinden solange ein I2C-Slave die an den Pull-Up-Widerständen anliegenden 3,3V Pegel als logisch High erkennt, I2C-Slave Open-Drain-Ausgänge können die Busleitung nicht aktiv nach High schalten; für sensiblere Anwendungen verwendet man aber besser einen Pegelwandler
5.2 Datenblätter
5.3 Online Ressourcen
hackaday.io Projektseite (englisch) IoT-Geigerzähler
hackaday.io Projektseite (englisch) Geigerzähler
5.4 PCB-Erstellung
5.5 Literatur
1. Programming the Raspberry Pi Pico in C – Harry Fairhead, I/O Press; ISBN 9781871962680 (First Edition)
2. Physik für Ingenieure – Hering, Martin, Stohrer, Springer Lehrbuch; ISBN 978-3-540-71855-0 (10. Auflage)
3. The Art of Electronics – Paul Horowitz/Winfield Hill, Cambridge University Press; ISBN 978-0-521-80926-9 (Third Edition)
Featured image: ehemalige Uranmine in Příbram, Tschechien