
1. Einleitung
Wie ich mich jeden Winter darauf freue im Frühling und Sommer auf meinem Balkon Pflanzen wachsen und gedeihen zu sehen.
Für so manche Gewächse wie Gemüse und Sonnenblumen habe ich in den letzten Jahren eine gewisse Zuneigung entwickelt.
Sonnenblumen, botanisch korrekt Helianthus annuus, sind an sich recht anspruchslose Pflanzen, die jedoch trockene Erde in heißen Sommern über längere Zeit nicht sehr gut vertragen.

Bisher bekam ich dieses Problem über meine liebenswürdige Vermieterin in den Griff, die gerne zum Gießen vorbeikam wenn ich mal für länger unterwegs war.
Zusätzlich hatte ich für heiße Tage eine simple automatische Bewässerung auf meinem Balkon in Betrieb: ein kleiner, mit Zeitschaltuhr gesteuerter Pumpenkreis, mit 10l-Eimer als Wasser-Reservoir.
Auf die Dauer waren das jedoch nur bessere Notlösungen.
Davon abgesehen dass Bekannte und Nachbarn nicht täglich zum Gießen vorbeikommen wollen, konnte ich weder aus der Ferne feststellen wie es meinen Blumen erging und gegebenenfalls Gießmengen anpassen, noch eher ambitionierte Projekte, wie beispielsweise größere Gemüsebeete, in Angriff nehmen.
Die Corona Quarantäne, Engpässe in Supermärkten, gesteigertes Interesse für “Home-Farming” Systeme sowie auch für den Laien zugängliche und erschwingliche Technik brachten mich schließlich zur Idee eines automatischen oder teilautomatischen Bewässerungssystems für Zuhause.
Eine mögliche Realisierung eines solchen DIY Projekts beschreibe ich im folgenden Blog-Artikel.
2. Projekt Ferngesteuerte Pflanzen-Bewässerung
Startpunkt meiner Überlegung war ein Bewässerungssystem, das von weit entfernten Orten aus überwacht werden kann.
Ich wollte vom Hotelzimmer oder vom Campingplatz aus einen Blick auf meine Blumen werfen, Bodenfeuchten mit einem Sensor auslesen, und dann bei Bedarf die Bewässerung aktivieren oder gleich in ein automatisches Programm wechseln.

Dabei war von Anfang an das Ziel, nicht mehr als 100 Euro auszugeben.
Für ein einigermaßen taugliches Gesamtsystem benötigte ich jedenfalls die folgende Hardware sowie mechanische Komponenten:
- eine programmierbare Steuerung mit WLAN-Baustein
- eine flexibel positionierbare Kamera
- eine unempfindliche Pumpe (plus Wasser-Reservoir, Ventil, Adapter und Schläuche)
- einen Schwimmerschalter (zum Schutz vor Trockenlauf der Pumpe)
- zusätzliche (Selbstbau-) Elektronik incl. Gehäuse, Netzteil und Verkabelung
- zwei (oder auch mehr) Bodenfeuchte-Sensoren
Dazu ist natürlich ein Internet-Router notwendig, der aber wohl mittlerweile in jedem Haushalt zu finden ist (FritzBox, Speedport, etc.).
Eine Art Sicherheitskonzept war ebenfalls nicht unwichtig, da ich mir nicht versehentlich den kompletten Balkon fluten wollte.
3. Der Raspberry Pi (RasPi)
Die programmierbare Steuerung ist die zentrale Komponente im Aufbau.
Grundsätzlich kann ein Projekt wie dieses mit diversen auf dem Markt verfügbaren Einplatinencomputern realisiert werden, die bei vielen Anbietern günstig zu haben sind.
Ich entschied mich für den Raspberry Pi 3, Modell B+ (im Weiteren RasPi genannt), nicht zuletzt wegen der guten Community Unterstützung die den Einstieg für einen Neuling enorm erleichtert (aktuell gibt es schon den RasPi 4, womit sich der Anschaffungspreis für den RasPi 3 je nach Lieferumfang im niedrigen zweistelligen Euro-Bereich bewegt).

Der RasPi ist ein vollwertiger Rechner mit unixoidem Betriebssystem, der für alle erdenklichen Aufgaben einsetzbar ist.
Die entscheidende Eigenschaft des RasPi aus Projekt-Sicht sind seine leicht zugänglichen sogenannten GPIO (General Purpose Input/Output) Ports, also elektrische Ein- und Ausgänge für Steuerungs-und Regelungsaufgaben.
Die GPIO-Leiste besitzt physikalisch 40 Pins, mit einer für meine Zwecke weit ausreichender Zahl an Ports. In Summe verwende ich fünf Ports (Versorgung der Sensoren, Pumpenansteuerung und I2C-Bus), sowie einen Abgriff für +5V (für ein Relais und einen Wandlerbaustein, dazu später mehr):
- GPIO 27 (Pin 13): Versorgung Bodenfeuchte-Sensor 1
- GPIO 12 (Pin 32): Versorgung Bodenfeuchte-Sensor 2
- GPIO 5 (Pin 29): Pumpenansteuerung
- GPIO 2 (Pin 3): I2C-Bus (Datenleitung – SDA)
- GPIO 3 (Pin 5): I2C-Bus (Taktsignal – SCL)
- Pin 2: +5V (VBUS vom USB-Anschluss)
- Pins für Masseanschluss
Die GPIO Ports sind im Prinzip gegeneinander austauschbar und die Wahl war mit Ausnahme der fest verdrahteten I2C-Anschlüsse willkürlich (Auswahl richtete sich vornehmlich nach maximal bequemer Erreichbarkeit durch Adapter/Buchsenleisten).
Man findet gleichfalls die erforderliche WLAN Funktionalität, eine Ethernet-Schnittstelle sowie eine Kameraschnittstelle (Camera Serial Interface) auf der Platine des RasPi.
Zudem wäre eine Messung der Außentemperatur mit einem DHT11- bzw. DHT22-Sensor, oder BMP/BME280-Sensor unproblematisch und gegebenenfalls sinnvoll (z. B. Abschaltung des Systems unterhalb einer bestimmten Temperaturschwelle), auf was ich aus Kostengründen und schlechter Verfügbarkeit der Teile zum Zeitpunkt der Erstellung dieses Artikels jedoch vorerst verzichtet habe.
4. Entwicklung zusätzlicher Hardware
4.1 Vorüberlegungen
Der höchste Spannungspegel an den GPIO Ports beträgt 5V, und das Netzteil des RasPi liefert als Maximum 15 Watt.
Da ich eine relativ leistungsfähige Wasserpumpe mit 12V und 1,3A (gemessener Wert, ungefährer elektrischer Strom im Arbeitspunkt) verwenden wollte war die Idee die Pumpe irgendwie über das RasPi Netzteil (mit) zu betreiben keine Option.
Vor diesem Hintergrund eine Kontrollrechnung: der Arbeitspunkt der eingesetzten Barwig Niedervolt-Tauchpumpe liegt bei Q = 12 liter/min und Δp = 0,6 bar. Die abgegebene hydraulische Leistung beträgt in diesem Punkt somit:
Phydr = (Q[l/min]*Δp[bar])/600 = (12*0,6)/600 = 0,012kW = 12W
Die aufgenommene elektrische Leistung berechnet sich mit bekannter Formel nach:
Pel = U[V]*I[A] = 12*1,3 = 15,6W
Die Differenz von Pel und Phydr ist erklärbar mit Messfehlern und Wirkungsgradverlust, wird hier aber nicht weiter thematisiert.
Man erkennt jedoch schnell anhand dieser Rechnungen, dass das RasPi Netzteil gewiss keine zusätzlichen etwa 16 Watt für eine Pumpe liefern kann.
Notwendig ist ein separates 12V-Netzteil sowie ein elektronischer Schalter zum Treiben (Einschalten) der Barwig Pumpe.
4.2 Schaltungs-Design
4.2.1 Elektronischer Schalter
Elektronische Verstärker bzw. Leistungsschalter mit Transistoren und Operationsverstärkern (OPs) können fertig als Bausatz gekauft, oder auch selbst entwickelt werden.
Ich entschied mich für den Selbstbau mit einem OP-IC (LM324) betrieben als sog. Schmitt-Komparator, also ein Vergleicher mit Hysterese. Die Hysterese verleiht dem Aufbau eine zusätzliche Robustheit, die Breite derselben ist aber nicht so kriegsentscheidend (mit den hier gewählten Widerstandswerten R7=10kOhm und R8=1kOhm ergibt sich ca. 1,1V).
Der LM324, der praktischerweise die gleiche Energiequelle wie die Tauchpumpe nutzt da die Versorgungsspannung nicht symmetrisch sein muss (“Single Supply OP Amp”), weist wie alle Operationsverstärker einen nahezu unendlich hohen Eingangswiderstand auf. Daher ist es problemlos möglich einen GPIO Output mit einem OP Eingang zu betreiben da die Eingangsströme nahezu Null Ampere betragen.
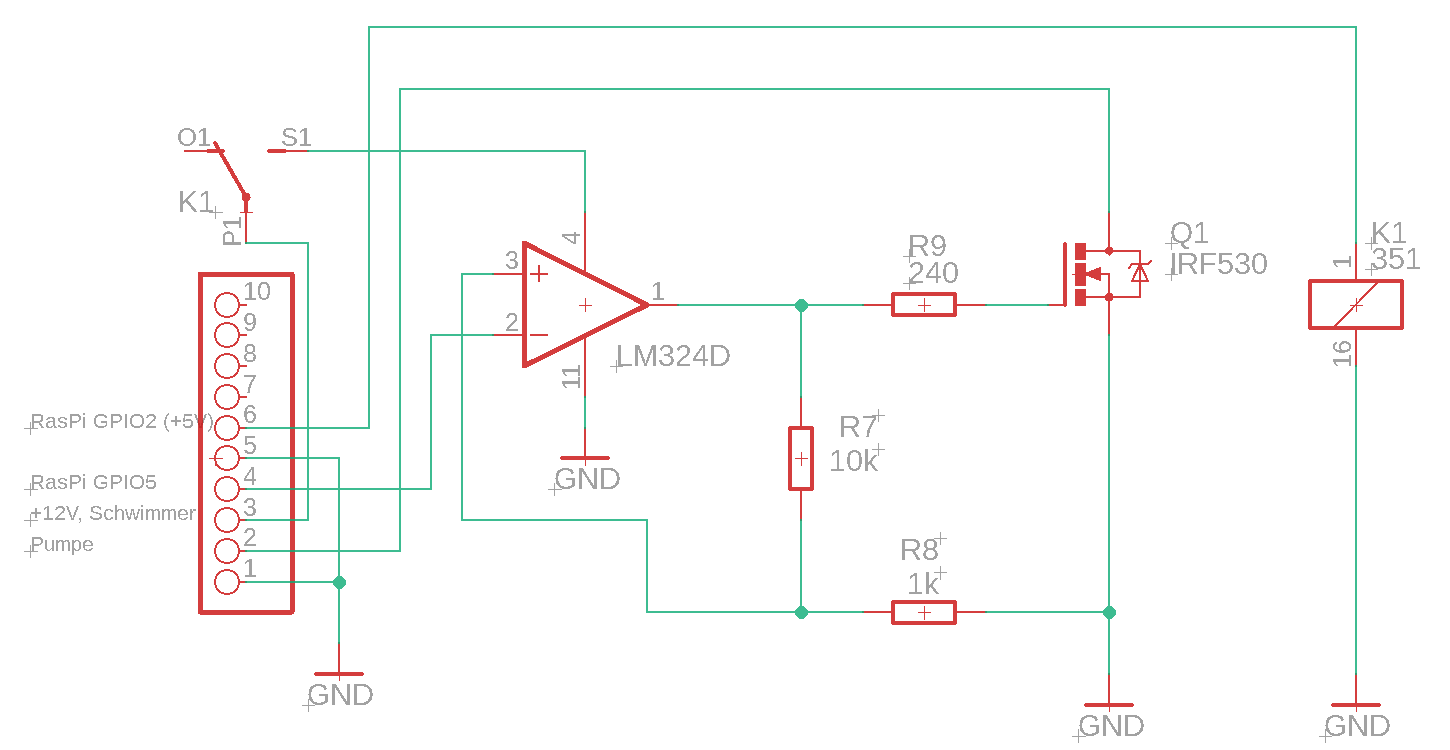
Schaltungsprinzip: ein Low-Pegel (0,0V) am GPIO port (hier port 5), welcher mit dem invertierenden Eingang des OPs (hier Pin 2) verdrahtet ist, aktiviert die Pumpe.
Der Ausgang des OPs schaltet bei Low-Pegel an diesem Eingang einen Feldeffekt-Transistor durch (der Ausgang führt nun 12V: genug um einen IRF530 n-Kanal MOSFET1 niederohmig zu schalten2), über dessen Drain-Source Strecke dann der eigentliche Pumpenstrom fließt.
Wechselt man auf High-Pegel (3,3V) am GPIO port, verbleibt die Pumpe im ausgeschalteten Zustand (Drain-Source Strecke hochohmig, da OP-Ausgang und damit Gate-Source Spannung nahe 0,0V).
4.2.2 Simulation
Mit einem Tool wie MapleSim oder LTspice kann eine OP Schaltung wie jene aus Abschnitt 4.2.1 simuliert und auf Schwächen im Design untersucht werden.
4.2.3 Hardware-Sicherheitskonzept
Neben den beschriebenen Bauteilen spendierte ich dem Aufbau, welche den RasPi und die Pumpeneinheit voneinander an sich schon entkoppelt, noch ein mit GPIO Pin 2 verbundenes 5V-Relais.
Wird das RasPi-Netzteil (versehentlich) abgesteckt oder gibt es anderweitig ein Spannungsproblem auf dem Board des Einplatinenrechners, dann soll eine Trennung der IC-Versorgungsspannungsleitung erfolgen um einen unkontrollierten Lauf der Pumpe (Auswirkung von “undefinierten” Spannungspegeln an den GPIO Ports) möglichst zu verhindern.
Ein noch in Reihe geschalteter Schwimmerschalter (z. B. PNS-55/10W) trennt den IC ebenfalls von der Versorgungsspannung. Dieser ist somit genauso Bestandteil meines Sicherheitskonzepts, wenngleich er in erster Linie die Pumpe vor Trockenlauf schützt.
Natürlich deckt mein Sicherheitskonzept nicht jede erdenkliche Fehlfunktion ab. Zum Beispiel führt ein Kurzschluss am MOSFET zwangsläufig zum Lauf der Pumpe, dies wird nicht unterbunden.
Hier muss man für sein eigenes Projekt abwägen ob ein Restrisiko akzeptabel ist; ein Szenario mit hartem Außeneinsatz und viel feuchter Wärme stellt andere Anforderungen als z. B. der Zimmerbetrieb.
Prinzipiell könnte man den zweiten Relaisschalter nutzen um die Pumpe zu trennen. Hier befindet man sich allerdings schon nahe der Grenze des erlaubten Schaltstromes (2A max. Schaltstrom lt. Datenblatt), ein kurzer Peak im Strom birgt das Risiko von Beschädigungen am Relais.
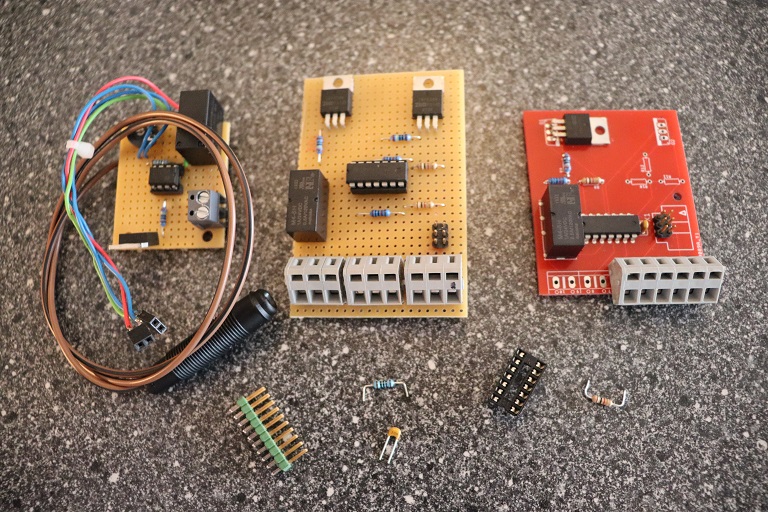
4.3 Evolution der Platinen
Für gewöhnlich startet der Entwickler bei einem neuen Elektronikprojekt mit ad-hoc Aufbauten auf Steckboards oder Lochrasterplatinen. Gelangt er irgendwann zu einem lohnenden Schaltungskonzept wechselt er normalerweise rasch auf ein Printed Circuit Board (PCB) das einschlägige Hersteller für Cent-Beträge fertigen können.
Ein Tool für die Erstellung digitaler Schaltpläne und Boards ist Autodesk EAGLE, es gibt aber auch viele andere freie Tools zum Herunterladen.
Das PCB, in welches Bauelemente ohne Verdrahtung nur noch einzulöten sind, besitzt nicht nur eine gewisse Ästhetik sondern bietet unter Anderem auch gute mechanische Eigenschaften und Beständigkeit gegen Umwelteinflüsse. Auch sind Mess- und Testergebnisse besser reproduzierbar.
Etwas nachteilig ist jedoch, dass die Bauelemente aufgrund Durchkontaktierungen mit gewöhnlichen Mitteln kaum mehr auslötbar sind (bei den hier nicht verwendeten SMD-Bauteilen ist das nicht der Fall).
5. Bodenfeuchte-Sensoren
5.1 Einführung
Auch die Bodenfeuchte-Sensorik könnte man mit wenig Zeitaufwand selbst entwickeln, was sich aufgrund geringer Preise für die erhältlichen Typen jedoch eher nicht lohnt.
Meine Entscheidung fiel nach kurzer Überlegung auf die resistiven Iduino ME110, Bodenfeuchte-Sensoren ursprünglich entwickelt für die Arduino Produktfamilie (in Abschnitt 10 findet sich das Datenblatt; der Arduino wäre im Übrigen eine im Prinzip gleichwertige Alternative zum RasPi gewesen).

Resistiv bedeutet, dass diese Sensoren den elektrischen Widerstand des feuchten Bodens messen.
Der Aufbau des ME110 ist einem Reverse Engineering zugänglich: neben den beiden metallbeschichteten Fühlern die man in die Erde steckt finden sich nur ein paar SMD-Bauteile auf der Platine.
Diese bilden eine einfache Verstärkerschaltung mit Bipolartransistor, in welcher die feuchte Erde Bestandteil des Basiswiderstandes ist (R1 dient dabei nur als Schutz bzw. Strombegrenzung).
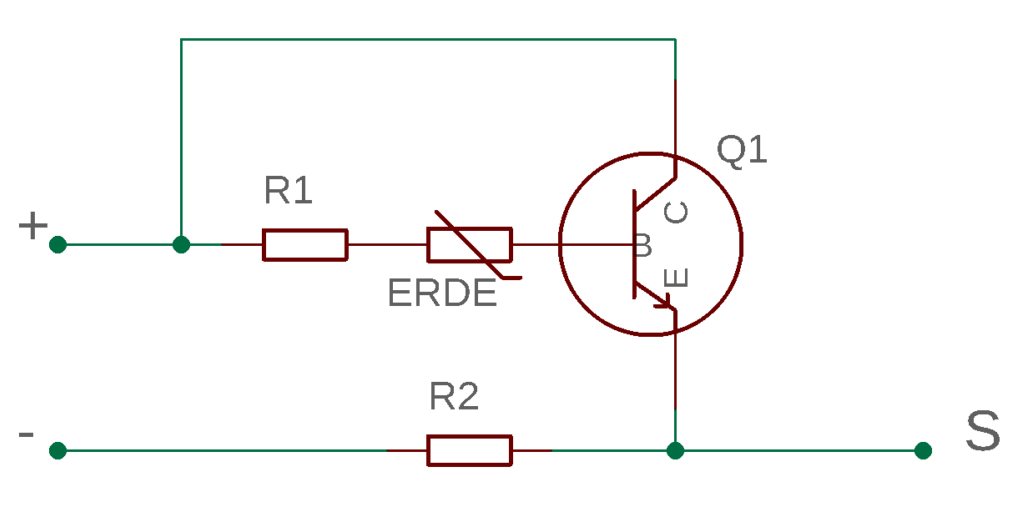
Insgesamt sind drei Anschlüsse an eine Stiftleiste geführt: Versorgungsspannung (+), Ausgangssignal (S) sowie Masse (–).
5.2 Physikalisches Verhalten
5.2.1 Sensor im geschlossenen Regelkreis
5.2.1.1 Regelstrecke feuchte Erde
Will man später eine zuverlässige und robuste Bodenfeuchte-Regelung passend zur Pflanzenart entwickeln (also eine Automatik, keine einfache Steuerung) ist die Kenntnis der Physik des Sensors, wie auch die der Regelstrecke nicht unwichtig.
Häufig sind in der Praxis Regelstrecken so genannte PT1-Glieder (Verzögerungsglieder erster Ordnung).
Über eine Sprungantwort, dem Standard-Prüfsignal der Regelungstechnik, wird dieses Verhalten auch für die Regelstrecke feuchte Erde schnell ersichtlich.
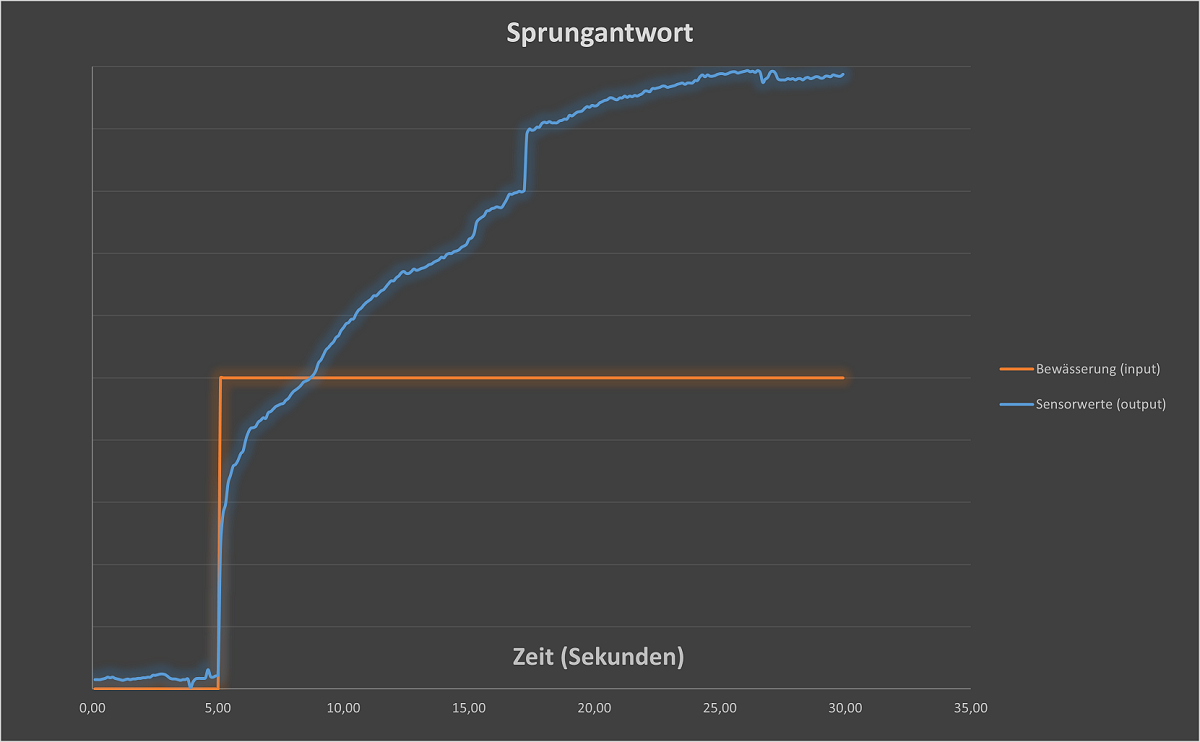
Man gibt dazu einen Sprung auf die Regelstrecke (hier: Bewässern mit voll geöffnetem Ventil) und tastet gleichzeitig die Regelgröße (hier: Sensorwert bei durchnässter Erde) in ausreichend kurzen Zeitabständen ab.
Als Regler für eine PT1-Strecke grundsätzlich gut geeignet ist ein PI-Typ (Proportional-Integral), ggf. auch ein einfacherer P-Typ (s. a. Abschnitt 10.5 mit einem Einführungsvideo in die Regelungstechnik).
Da der RasPi an seinen GPIOs PWM-Funktionalität (Pulsweitenmodulation) bereitstellt bietet sich die Benutzung derselben als Stellgröße in einem geschlossenen Regelkreis an: die Leistung der Tauchpumpe ließe sich unproblematisch über eine (Hardware wie Software) PWM variieren.
5.2.1.2 Regelkreis für Sonnenblumen
Bei nicht so empfindlichen Pflanzen kann eine Regelung auch sehr rudimentär konzipiert sein: der Feuchtegrad des Bodens wird zyklisch in festgelegten Intervallen (etwa fünf Minuten oder auch länger) abgefragt.
Ist ein Schwellwert unterschritten wird für einige Sekunden “undosiert” (Pumpe volle Leistung, offenes Ventil) bewässert da eine geringe Überwässerung zunächst einmal unkritisch ist. Kontinuierlich erfolgen anschließend weitere zyklischen Abfragen.
Ein Plausibilitätscheck sollte bei einer solcherart gestalteten Regelung dafür sorgen, dass sich die Bewässerung nach einer festgelegten Anzahl an Bewässerungszyklen ohne Effekt (bei zum Beispiel: Sensor gezogen, Schwimmerschalter ausgelöst etc.) selbst deaktiviert.
Das geschilderte Regelprinzip funktioniert ein wenig wie eine Zweipunktregelung.
5.2.2 Resistive Bodenfeuchte-Sensoren
Wie weiter oben gezeigt sind die Iduino ME110 Bodenfeuchte-Sensoren im Grunde simple Widerstands-Messgeräte.
Feuchte Erde hat einen geringeren ohmschen Widerstand wie trockene. Zur Messung wird ein elektrischer Strom durch die Erde geleitet, und aus dessen Höhe ein Ausgangssignal generiert (Ohmsches Gesetz: I = U/R).

Diese Methode hat eine Reihe entscheidender Nachteile:
- elektrolytische Vorgänge zersetzen die Elektroden (genauer: eine Elektrode) und machen den Sensor nach einer bestimmten Zeit unbrauchbar
- die entstehenden Reaktionsprodukte schädigen unter ungünstigen Umständen die Pflanzenwurzeln
- unvermeidbare elektrische Verlustleistung während der Messung (Pel = U*I)
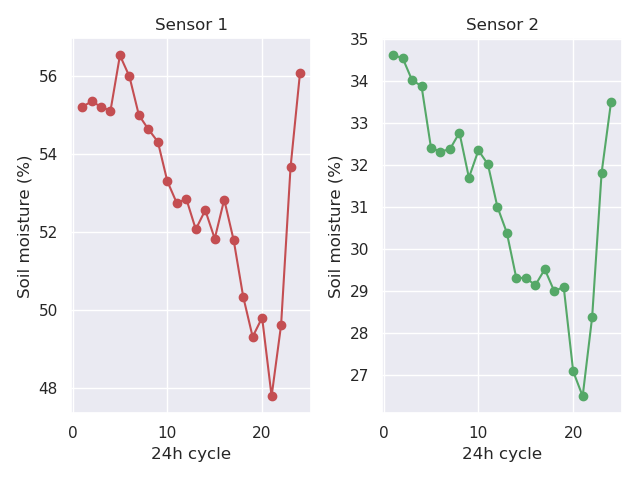
Auch typische Störgrößen wie Temperaturschwankungen können das Ausgangssignal bei diesem Sensortyp in unerwünschter Weise teilweise drastisch verändern (auch ist ganz allgemein eine schwankende Versorgungsspannung natürlich ein Problem).
Und tatsächlich ergaben Langzeitmessungen im Außenbereich ein betragsmäßiges Delta von etwa 1% pro 1°C, also Differenzen von grob 10% Bodenfeuchtigkeitswert zwischen einer Tag- und einer Nachtmessung bei ansonsten gleichem Feuchte-Niveau.
Es gibt nun zwei Möglichkeiten für den Entwickler:
Er steigt entweder um auf die in Entwicklerkreisen populären kapazitiven Sensoren (diese ermitteln die sich verändernde Permittivitätszahl des Bodens), oder er minimiert das Problem mit einer durchdachten Kombination aus Programmcode und Schaltungstechnik3.
Ich werde in Abschnitt 7 eine programmtechnische Lösung mit Python aufzeigen, mit Nutzung zweier zusätzlicher GPIO Ports.
Resistive Sensoren haben allerdings durchaus ihre Daseinsberechtigung. Die wesentlichen Vorteile sind:
- geringste Preise sowie gute Verfügbarkeit
- kurze Ansprechzeiten (d.h. schnelle Reaktionszeit)
- aufgrund des simplen Aufbaus robust (kein Oszillator, IC u. dgl.)
5.3 Verbindung zum Raspberry Pi
5.3.1 Analog-Digital-Wandler (ADC)
Der RasPi verfügt leider nicht über einen implementierten Analog-Digital-Wandler (auch AD-Umsetzer oder schlicht ADC genannt).
Daher kann er mit den Spannungs-Rohwerten an den Sensor-Ausgängen (im Bereich 0V – 1,7V, wird der ME110 Sensor mit 3,3V betrieben) zunächst wenig anfangen. GPIO Ports konfiguriert als Input verstehen nur die beiden Zustände High (logisch 1) oder Low (logisch 0).
Die Anschaffung von zusätzlicher Elektronik ist also notwendig.
Die Auswahl eines AD-Wandlers bereitet eigentlich wenig Schwierigkeiten, da der Anwendungsfall weder hohe Anforderungen an Wandlungs- oder Latenzzeit stellt noch eine sonderlich hohe Auflösung erfordert.
Ich entschied mich für einen (hier wohl etwas überdimensionierten) um sieben Euro teuren 16bit ADS1115 Wandler mit vier Analogeingängen (A0–A3), der mittels I2C-Bus (Anschlüsse SDA und SCL) mit dem RasPi (GPIO 2 und GPIO 3) interagiert (in Abschnitt 10 finden sich die Datenblätter).
Da ich vorerst nur zwei Sensoren und somit die Eingänge A0 und A1 benutze, stehen die Eingänge A2 und A3 zum Einlesen anderer Messwerte als der Bodenfeuchte zur Verfügung (zum Beispiel könnte ein Shunt den Pumpenstrom erfassen).
Neben den Ein- und Ausgängen ist natürlich auch der Anschluss einer Versorgungsspannung inklusive Masse nötig (VDD und GND). Dies können die vom RasPi durchgeschliffenen 5V sein4.
Der ADDR-Eingang und der ALRT-Ausgang bleiben hier offen.
5.3.2 Einrichtung des ADC im System
Im Folgenden nur ein kurzer Überblick der nicht jede und ggf. auch nicht mehr notwendige Vorarbeit mit einschließt, wie z. B. die Installation von “Adafruit-Blinka”.
Ausführliche Anleitungen zur Einrichtung eines AD-Wandlers auf dem RasPi sind in Abschnitt 10, wie auch leicht per Suchmaschine zu finden.
5.3.2.1 Vorgehen
Installation der ADC Bibliotheken per Kommandozeile (mit dem offiziellen Paketmanager pip3; Python-Bibliotheken haben die Form eines Pakets):
$ sudo pip3 install adafruit-circuitpython-ads1x15
Einbinden der ADC und I2C Module im Kopf des Scriptes:
(…)
import board
import busio
import adafruit_ads1x15.ads1115 as ADS
from adafruit_ads1x15.analog_in import AnalogIn
# Create the I2C bus
i2c = busio.I2C(board.SCL, board.SDA)
# Create the ADC object using the I2C bus
ads = ADS.ADS1115(i2c)
(…)
Hinweis: Bibliotheken (auf die sämtliche Python-Programme zugreifen) befinden sich normalerweise in folgendem Verzeichnis:
/usr/local/lib/python3.7/dist-packages/
Man sollte nicht vergessen die I2C-Funktion in der RasPi-Config zu aktivieren:
$ sudo raspi-config
Anzeige aller angeschlossenen I2C-Geräte über den folgenden Befehl:
$ i2cdetect -y 1
Der ADC hat ab Werk die I2C-Adresse 0x48 (Hinweis: Option [-y] deaktiviert den interaktiven Modus).
6. Fernsteuerung via App
6.1 WLAN
Das erste Glied der drahtlosen Kommunikationskette ist das WLAN.
Da ich einen Raspberry Pi 3, Modell B+ für mein Bewässerungssystem verwende musste ich mir um die Einrichtung des WLAN jedoch nicht allzu viele Gedanken machen.

Jeder RasPi ab Version 3 besitzt integriertes WLAN. Beim ersten Hochfahren sollte lediglich der Netzwerkschlüssel zur Hand sein, die weitere Einrichtung erfolgt automatisch.
Ich arbeite im Folgenden mit einer statischen lokalen IP-Adresse. Diese Adresse ist in folgender Textdatei auf dem RasPi fixiert:
/etc/dhcpcd.conf
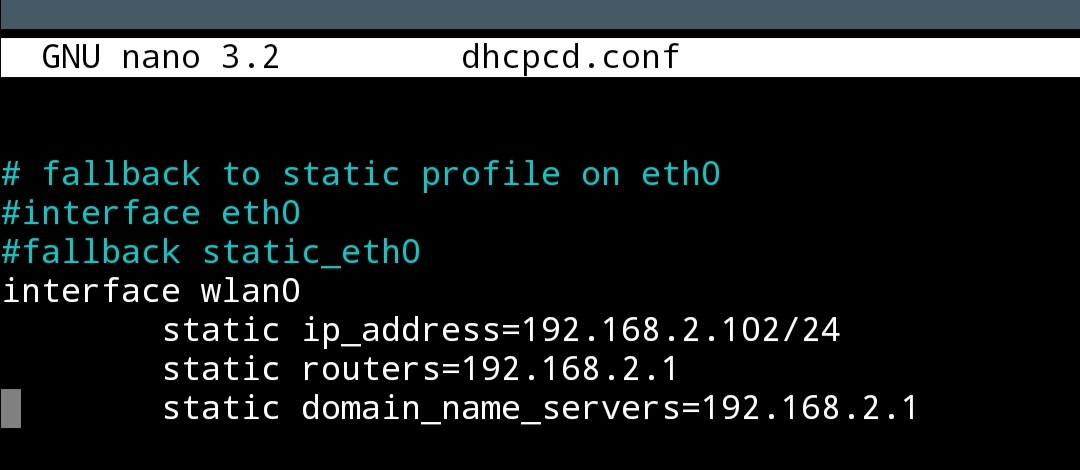
DHCP-Einstellungen am Router sind daher an der Stelle bedeutungslos.
6.2 VPN
Zur Etablierung einer VPN-Verbindung sind zunächst einige Modifikationen am Router unumgänglich.
6.2.1 Router-Einstellungen
Es gibt die unterschiedlichsten Router auf dem Markt. Je nach Modell kann der Benutzer mehr oder weniger einfach Anpassungen in den Einstellungen vornehmen.
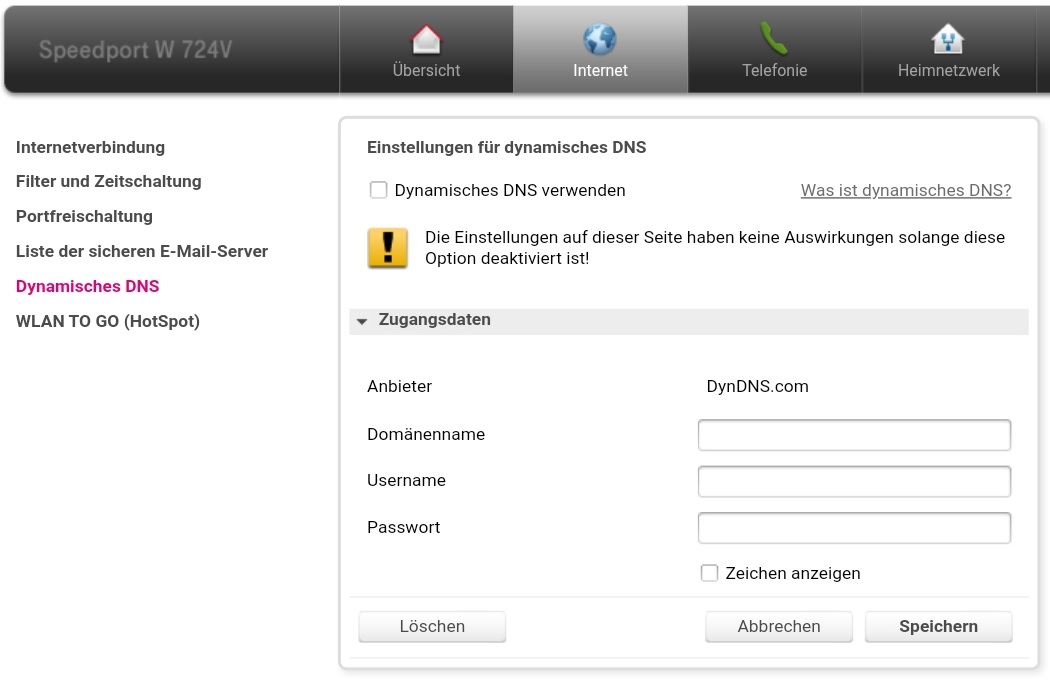
Da sich Einstellmöglichkeiten und Menüführung mitunter stark unterscheiden und die Thematik umfangreich ist werde ich im Folgenden nicht tief ins Detail gehen (ich verwende bei mir zu Hause einen schon etwas in die Jahre gekommenen Speedport W724V).
Auf jeden Fall ist eine Portweiterleitung (port forwarding) auf dem Router einzurichten (genutzt wird UDP port 1194; würde man etwa einen Webserver auf dem RasPi betreiben wollen wäre auf Port 80, d. h. HTTP weiterzuleiten).
DHCP sollte aktiv bleiben da sonst u. U. andere Netzwerkteilnehmer nicht mehr wie gewohnt funktionieren. Bei Verwendung einer statischen IP-Adresse gemäß Abschnitt 6.1 muss man sich mit diesem Punkt eigentlich nicht näher befassen.

Es gilt zu beachten, dass die meisten Router bzw. Anschlüsse selbst keine statische IP-Adresse nach außen haben (öffentliche WAN-IP, diese ist zu unterscheiden von lokalen bzw. privaten IP(v4)-Adressen im Heimnetzwerk).
Jede Neuzuweisung einer IP-Adresse durch den ISP (bei meinem Anschluss passiert das u. A. beim Aus- und wieder Einschalten des Gerätes) hat zur Folge dass der Nutzer Anpassungen im VPN-Zertifikat vornehmen muss.
Umgehen könnte man das mit einem (zumeist kostenpflichtigen) DDNS-Dienst. Ein solcher Dienst kann einen frei zu wählenden Domain-Namen sich dynamisch ändernden IP-Adressen zuordnen, die der Nutzer dann nicht mehr zu kennen braucht.
6.2.2 Softwareinstallation auf dem RasPi
Natürlich reichen Modifikationen am Router für sich alleine noch nicht aus.
Auch dem RasPi selbst muss man VPN beibringen. Wie man im System einen VPN-Server einrichtet, ist zum Beispiel hier gut und ausführlich beschrieben.
Nach erfolgreicher Installation kann der Nutzer über Shell-Kommandos5 ein Benutzerprofil anlegen und ein Zertifikat in Form einer .ovpn-Datei erzeugen (enthält u. A. den VPN-Schlüssel, die IP-Adresse des Routers und den UDP/TCP port), welches er anschließend auf sein Android Smartphone überträgt und in die VPN-App einliest.
6.3 Smartphone-Applikationen
Nach der oben beschriebenen Vorarbeit kann man nun zwei Smartphone-Applikationen installieren: eine App zum Aufbau der VPN-Verbindung, eine weitere für den System-Zugriff via SSH-Shell (ggf. zusätzliche Apps rein für Monitoring-Zwecke).
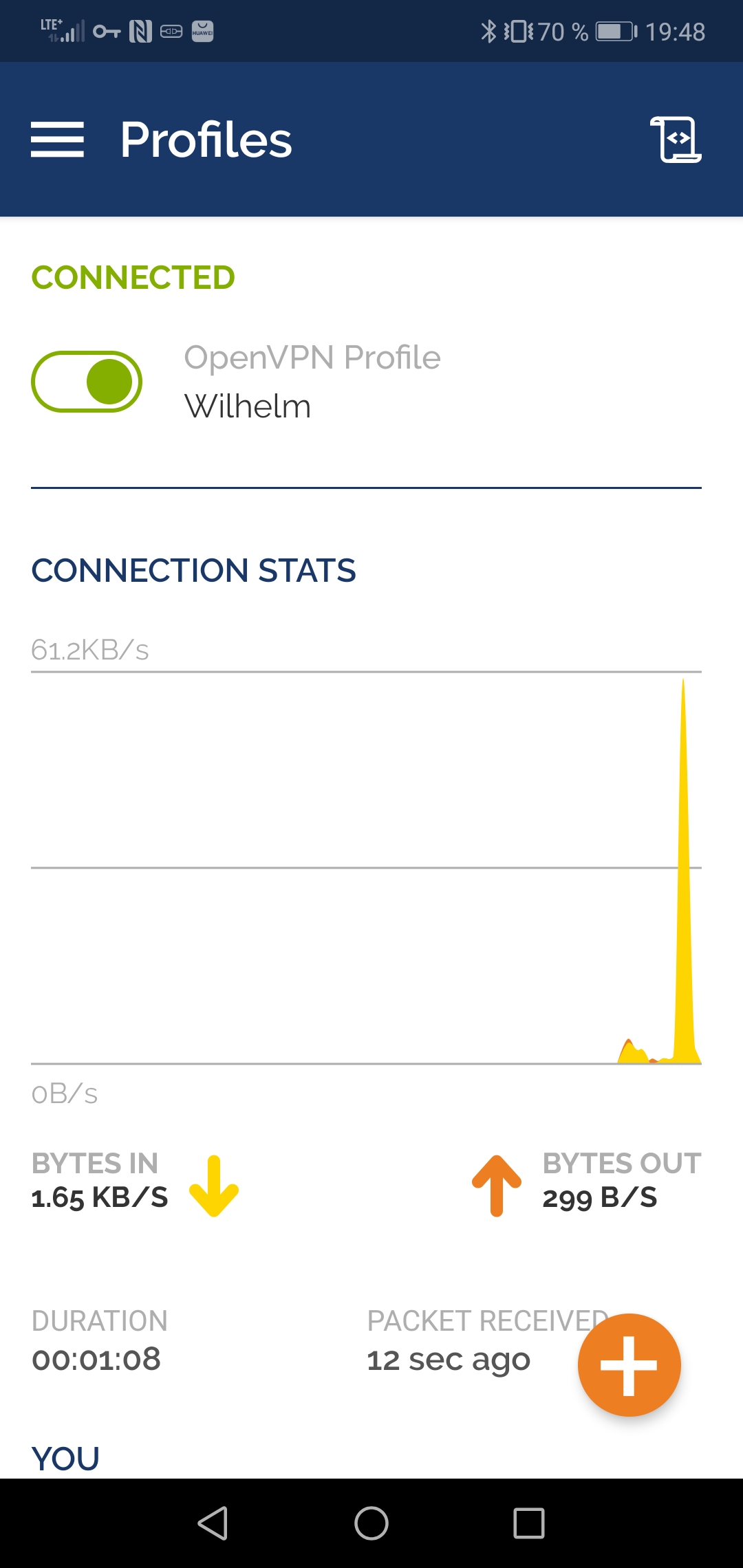
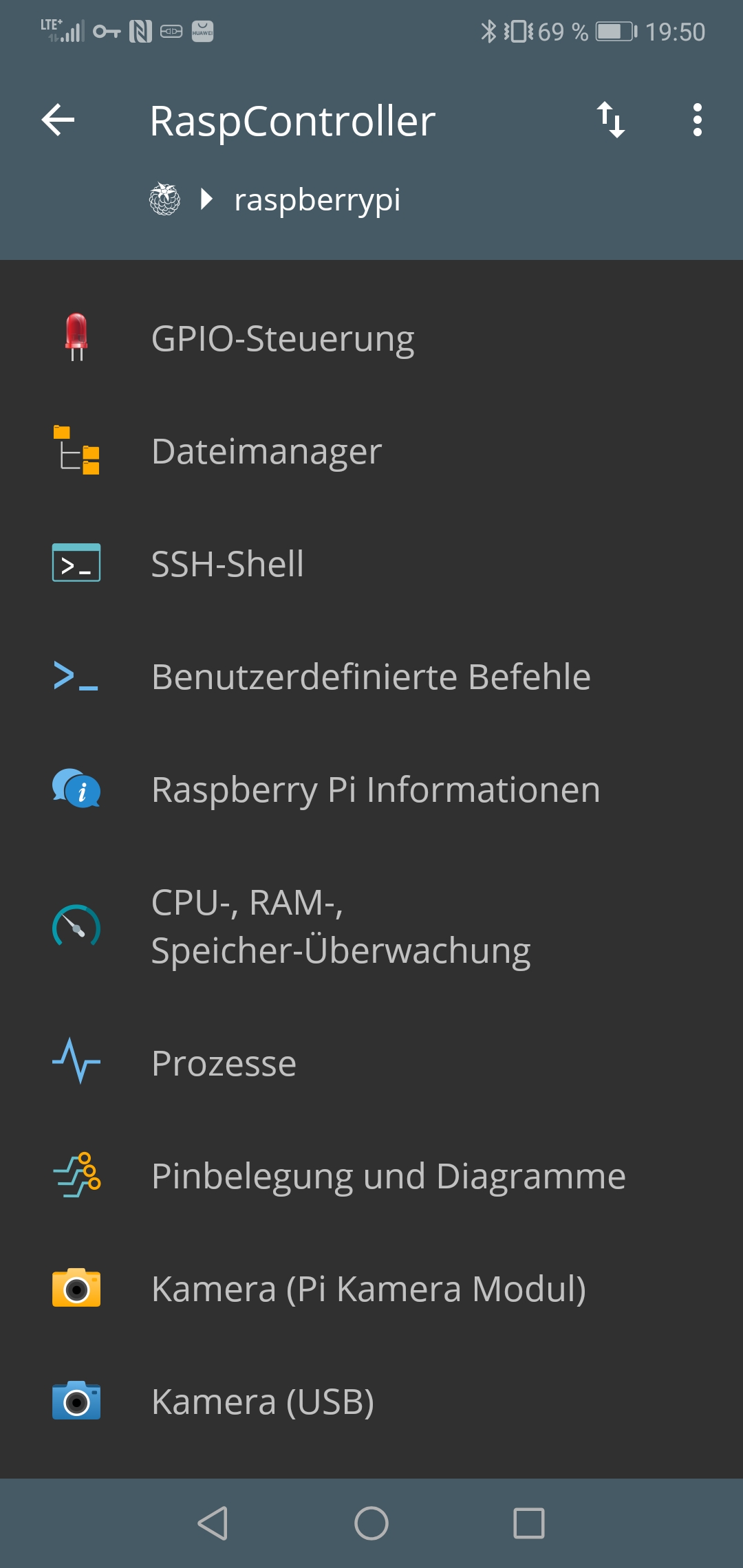
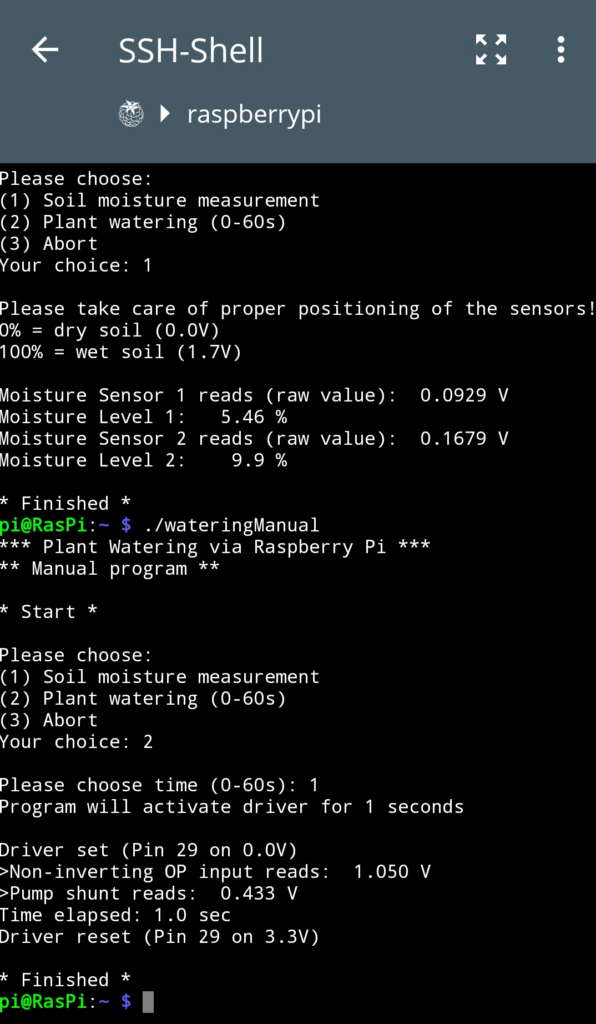
Ist die VPN-Verbindung etabliert ist es für den Anwender möglich über z. B. die App “RaspController” Python-Code auf der Shell auszuführen (siehe auch obiger screenshot):
$ cd /meinPfad/code
$ python3 meinProgramm.py
Das Python-Programm kann auch als Hintergrund-Prozess laufen6 (Ampersand & am Ende der Zeile):
$ cd /meinPfad/code
$ nohup python3 meinProgramm.py &
Am einfachsten ist es wohl aus solchen Befehlen ein Shell-Script zu kreieren, was dann nur noch die Eingabe des Shell-Script Namens auf der Kommandozeile erfordert7:
$ ./meinShellscript
Mit ./ wird das aktuelle Verzeichnis verwendet. In ein Shell-Script lassen sich leicht zusätzliche Software-Sicherheitsmechanismen, wie beispielsweise ein GPIO port Initialisierungs-Script, implementieren.
7. Python-Beispiele
Im Folgenden führe ich einige (“quick&dirty”) Beispiele und Codeschnipsel auf, die für Projekte generisch verwendbar sind.
Getestete Codesequenzen finden sich auch in meinem Github-Repository (wird fortlaufend erweitert).
Selbstverständlich kann man für die Programmentwicklung auch eine andere Sprache als das einsteigerfreundliche Python nutzen.
7.1 Vorbedingungen
Der weiter unten wiedergegebene Code ist nur fehlerfrei ausführbar mit folgenden Modul-Importen (siehe auch Abschnitt 5):
(…)
import RPi.GPIO as GPIO
import datetime
import time
(…)
7.2 Aktivieren der Pflanzen-Bewässerung
In diesem Codebeispiel wird GPIO 5 (Pin 29, verdrahtet mit dem invertierenden OP-Eingang) auf Low-Pegel gesetzt.
Während der Bewässerung erfolgt eine Ausgabe auf der Kommandozeile. Die Tastenkombination CTRL+C unterbricht die while-Schleife (Befehl KeyboardInterrupt).
(…)
GPIO.setmode(GPIO.BCM)
GPIO.setup(5, GPIO.OUT)
(…)
s=0.0
wartezeit=1.0
(…)
print("Program will activate driver for", bewZeit, "seconds")
GPIO.output(5, GPIO.LOW)
print("Driver set (Pin 29 on 0.0V)")
try:
while s<bewZeit:
time.sleep(wartezeit)
s+=wartezeit
print("Time elapsed:", s, "sec")
except KeyboardInterrupt:
print("Interrupted!")
GPIO.output(5, GPIO.HIGH)
print("Driver reset (Pin 29 on 3.3V)")
(…)
7.3 Auslesen der Bodenfeuchte-Sensoren
Die resistiven ME110 Sensoren hängen nicht unmittelbar an einer Spannungsquelle, die GPIO Ports schalten diese aktiv8. Einlesen der Sensorspannung durch den AD-Wandler und anschließende Umrechnung9 erfolgen synchron.
Diese “on-demand” Zuschaltung verhindert bzw. verlangsamt die korrosive Zersetzung der Sensor-Elektroden (Elektrolyse) aufgrund Dauerstroms durch die Erde.
(…)
def moisture_percent (a):
b = (a/1.7)*100
return b
(…)
# Bodenfeuchte-Sensor 1
GPIO.setup(27, GPIO.OUT)
GPIO.output(27, GPIO.HIGH)
time.sleep(1)
chan0 = AnalogIn(ads, ADS.P0)
voltage0 = chan0.voltage
print("Moisture Sensor 1 reads (raw value): ","{:>2.4f}".format(voltage0), "V")
moistureLevel_1 = moisture_percent(voltage0)
print("Moisture Level 1: ","{:>3.2f}".format(moistureLevel_1), "%")
time.sleep(1)
GPIO.output(27, GPIO.LOW)
(…)
# Bodenfeuchte-Sensor 2
GPIO.setup(12, GPIO.OUT)
GPIO.output(12, GPIO.HIGH)
time.sleep(1)
chan1 = AnalogIn(ads, ADS.P1)
voltage1 = chan1.voltage
print("Moisture Sensor 2 reads (raw value): ","{:>2.4f}".format(voltage1), "V")
moistureLevel_2 = moisture_percent(voltage1)
print("Moisture Level 2: ","{:>3.2f}".format(moistureLevel_2), "%")
time.sleep(1)
GPIO.output(12, GPIO.LOW)
(…)
7.4 Erzeugen eines logfiles
Praktisch für ein automatisches Bewässerungs-Programm das nichts auf der Kommandozeile ausgibt (zum Beispiel wenn das Programm als Hintergrundprozess ausgeführt wird).
Man könnte Daten, sobald sie umfangreicher und graphisch aufzubereiten sind, auch gleich mit entsprechenden Befehlen in ein Spreadsheet schreiben (“xlsxwriter”-Modul).
(…)
file = open("logfile_0815.txt", "w")
file.write("--- Logfile Start ---\n\n")
(…)
file.write("Speicherzeit dieses Logfiles:\n")
file.write("{:%d.%m.%Y %H:%M:%S}".format(datetime.datetime.now()))
file.write("\n")
(…)
file.write("Eingangsspannung:\n")
file.write("{:>2.3f}".format(InputVoltage))
file.write("V")
file.write("\n")
(…)
file.write("Bodenfeuchte (Sensor 1):\n")
file.write(str(int(moistureLevel_1)))
file.write("%")
file.write("\n")
(…)
file.write("--- Logfile Ende ---")
file.close()
(…)
8. Prototypen
Erste Prototypen sind in den folgenden zwei kurzen Videosequenzen zu sehen.
Dort ist auch der, in diesem frühen Entwicklungsstadium noch sehr einfache, hydraulische Aufbau zu erkennen – dieser besteht aus einem Kugelhahn incl. Adapter, einem Kunststoff-Schlauchverbinder und etwa drei Metern Kunststoff-Schlauch.
8.1 Früher Prototyp ohne Sensoren
Als zusätzliche Elektronik verwende ich hier lediglich einen einfachen elektronischen EIN/AUS-Schalter (mit Operationsverstärker µA 741).
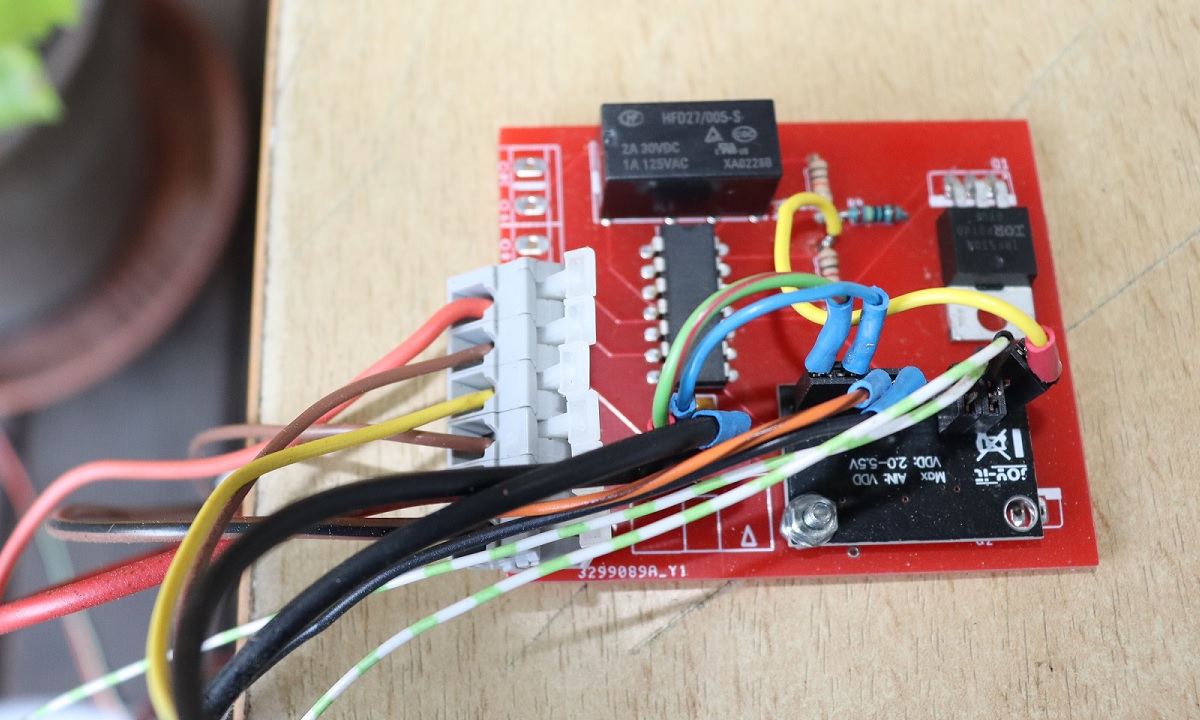
8.2 Fortgeschrittener Prototyp mit Sensor und Kamera
Dieser Aufbau ist bereits mit mehreren Sicherheitsmechanismen versehen (5V-Relais, Schwimmerschalter).
8.3 Weitere Prototypen
Ein aktueller Prototypen-Stand ist auf meiner Projektseite auf hackaday.io zu finden.
Da die Kommentarfunktion auf diesem Blog bis auf Weiteres deaktiviert ist, bitte ich auf jener Seite um Fragen und Kommentare.
9. Zusammenfassung und Ausblick
Im Artikel thematisierte ich einige Ideen zu einer ferngesteuerten Pflanzen-Bewässerung mit einem Raspberry Pi, und setzte diese erfolgreich in die Praxis um.
Es ist offensichtlich, dass die zahllosen Möglichkeiten die Hardware und insbesondere Software bieten nur zu einem geringen Maß ausgeschöpft sind.
Zum Beispiel ist die Verwendung von MQTT (“Message Queuing Telemetry Transport”, ein simples Protokoll zur Übertragung von Messdaten), Python-GUIs oder auch eigens entwickelten Smartphone-Apps denkbar, welche Kommandos auf der SSH-Shell ersetzen und die Bedienung insgesamt komfortabler machen.
Über eine API wären Wetterdaten verfügbar, und separate Sensorik könnte die lokale Temperatur oder auch Luftfeuchte erfassen.
Regelkreise für eine komplett automatisierte Bewässerung passend zur Pflanzenart kann der geneigte Programmierer von Grund auf entwickeln und schrittweise verbessern.
Elektronik-Design und das hydraulische Netzwerk sind von einem Verbesserungsprozess gleichfalls nicht ausgenommen (Ultraschall-Füllstandsmessung, Ventilumschaltung, Durchflussmessung etc.).
10. Weiterführende Informationen
10.1 Elementare Elektronik
10.1.1 Elektronik-Anbieter
10.1.2 PCB-Hersteller
10.1.3 Schaltplan und Board-Design
10.1.4 Datenblätter
Iduino ME110 Bodenfeuchte-Sensor
10.2 Konfiguration des Gesamtsystems
10.2.1 Raspberry Pi
Raspberry Pi 4 – Ersteinrichtung für Einsteiger
10.2.2 Analog-Digital-Wandler
10.2.2.1 Einrichtung und Datenblatt
Adafruit 4-Channel ADC Breakouts: Python
10.2.2.2 Technisches Prinzip
Delta-Sigma ADC (Wertetabelle)
10.2.3 Einrichtung des VPN
PiVPN installiert OpenVPN auf dem Raspberry Pi
Was ist Dynamisches DNS (DynDNS)
10.3 Fußnoten
1 es handelt sich hier um einen Anreicherungstyp (“enhancement mode”), also einen selbstsperrenden MOSFET der bei 0V am Gate keinen Strom leitet
2 auch wenn es vielleicht naheliegend erscheint: ein direktes Ansteuern der Pumpe mit diesen 12V ist nicht möglich da der OP-Ausgang nur Strom im Milliampere-Bereich liefert; ein IRF530 verträgt dauerhaft mehr als 10A
3 der Vollständigkeit halber sei hier erwähnt, dass z. B. ein Schaltungs-Design mit einem Rechteckoszillator, der den Stromfluss am Sensor zyklisch umpolt, Abhilfe bzgl. der elektrolytischen Zersetzung schaffen kann
4 solange ein I2C-Slave die an den “Pull-Up”-Widerständen anliegenden 3,3V Pegel (vgl. RasPi-Schaltplan, Widerstände R23 und R24) sicher als logisch High erkennt kann man das schaltungstechnisch so machen (I2C-Slave Open-Drain-Ausgänge können die Busleitung nicht aktiv nach High schalten); man sollte in diesem Fall nur sicherstellen dass Slaves auf ihren Platinen nicht eigene Pull-Up-Widerstände mitbringen
5 eine Shell interpretiert Befehle via Kommandozeile, eine SSH-Shell ist eine Art “entfernter” Kommandozeilenzugriff über ein gesichertes Protokoll
6 einen über nohup geschützten Prozess beendet man mit dem Befehl kill <PID> (SIGTERM). Anzeige der Prozessliste mit allen PIDs über die Anweisung ps -e
7 gilt insbesondere dann wenn man die Umgebungsvariable PATH mit dem entsprechenden Verzeichnis erweitert
8 generell ist es nicht zu empfehlen, Komponenten direkt über die GPIO Ports zu versorgen (diese Aussage gilt grundsätzlich nicht für die zwei 5V-Anschlüsse, diese hängen an USB VBUS); da der Strom durch die Sensoren allerdings äußerst gering ist (wenige mA), ist die beschriebene technische Umsetzung wohl in Ordnung
9 verwendet man mehrere def-Blöcke, so wäre es guter Programmierstil diese in ein eigenes .py-File auszulagern und jenes über den import-Befehl einzubinden. Der Zugriff auf die Funktionen erfolgt dann über die übliche Punktnotation
10.4 Sonstige Ressourcen
Einführung in die Regelungstechnik (englisch)
hackaday.io Projektseite (englisch) Pflanzen-Bewässerung
10.5 Literatur
1. Shell Programmierung – Jürgen Wolf, Galileo Computing; ISBN 978-3-8362-1650-0 (3. Auflage)
2. Taschenbuch der Regelungstechnik – Lutz/Wendt, Verlag Harri Deutsch; ISBN 978-3-8171-1895-3 (9. Auflage)
3. Mikroprozessortechnik – Klaus Wüst, Vieweg+Teubner; ISBN 978-3-8348-0906-3 (4. Auflage)